Ch 6 (part II) Microprogrammed Architectures
Ryan Robucci

• Spacebar to advance through slides in order
• Shift-Spacebar to go back
• Arrow keys for navigation
• ESC/O-Key to see slide overview • ? to see help
• ESC/O-Key to see slide overview • ? to see help
 Printable Version
Printable Version
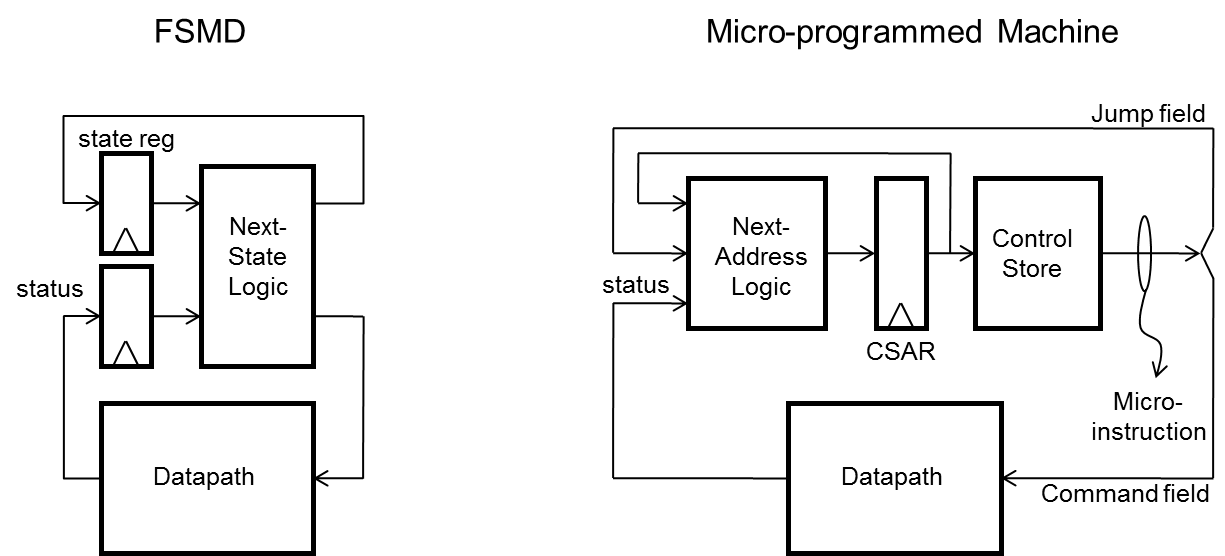
FSMD vs Microprogram-Controlled Machine
- With a microprogrammed machine, th next-state logic of FSM is replaced with a programmable memory called the Control Store
- The control store holds micro-instructions, and is addressed using a registered called a CSAR (Control Store Address Register)
Microinstruction Encoding
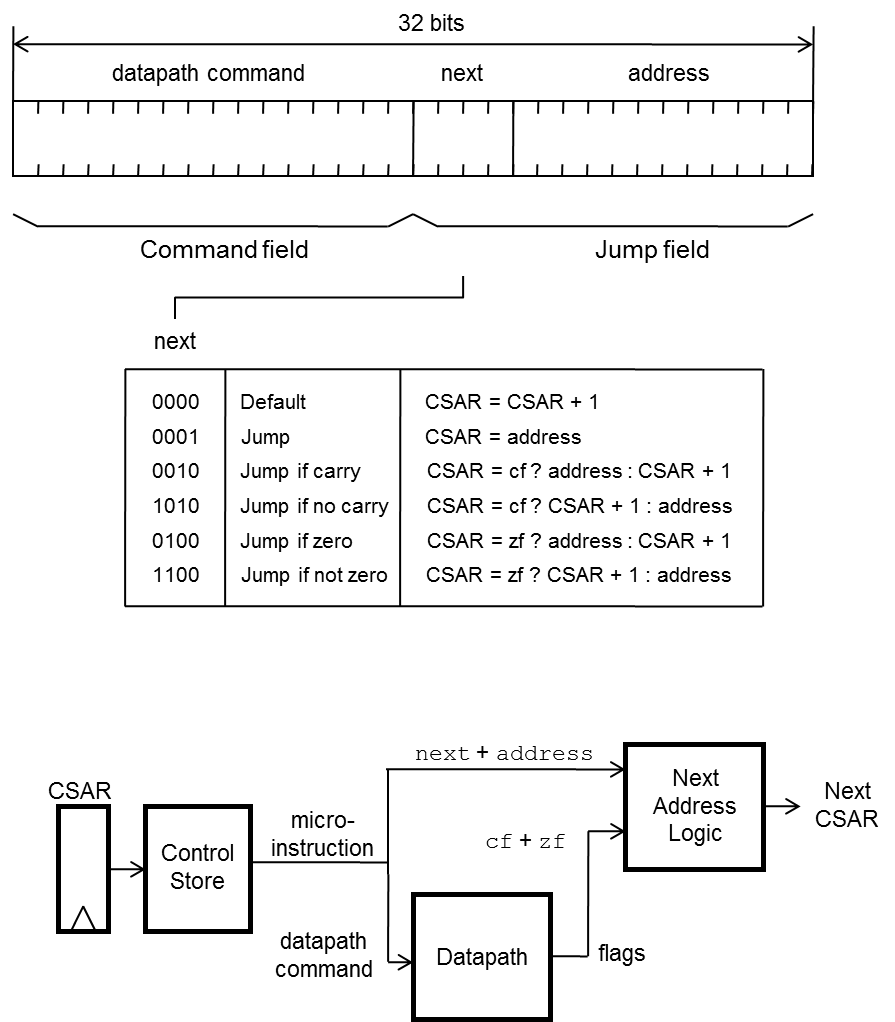
- A key design choice is the format of micro-instructions in the control store
- A sample format for a 32-bit micro-instruction word is shown
Command Field
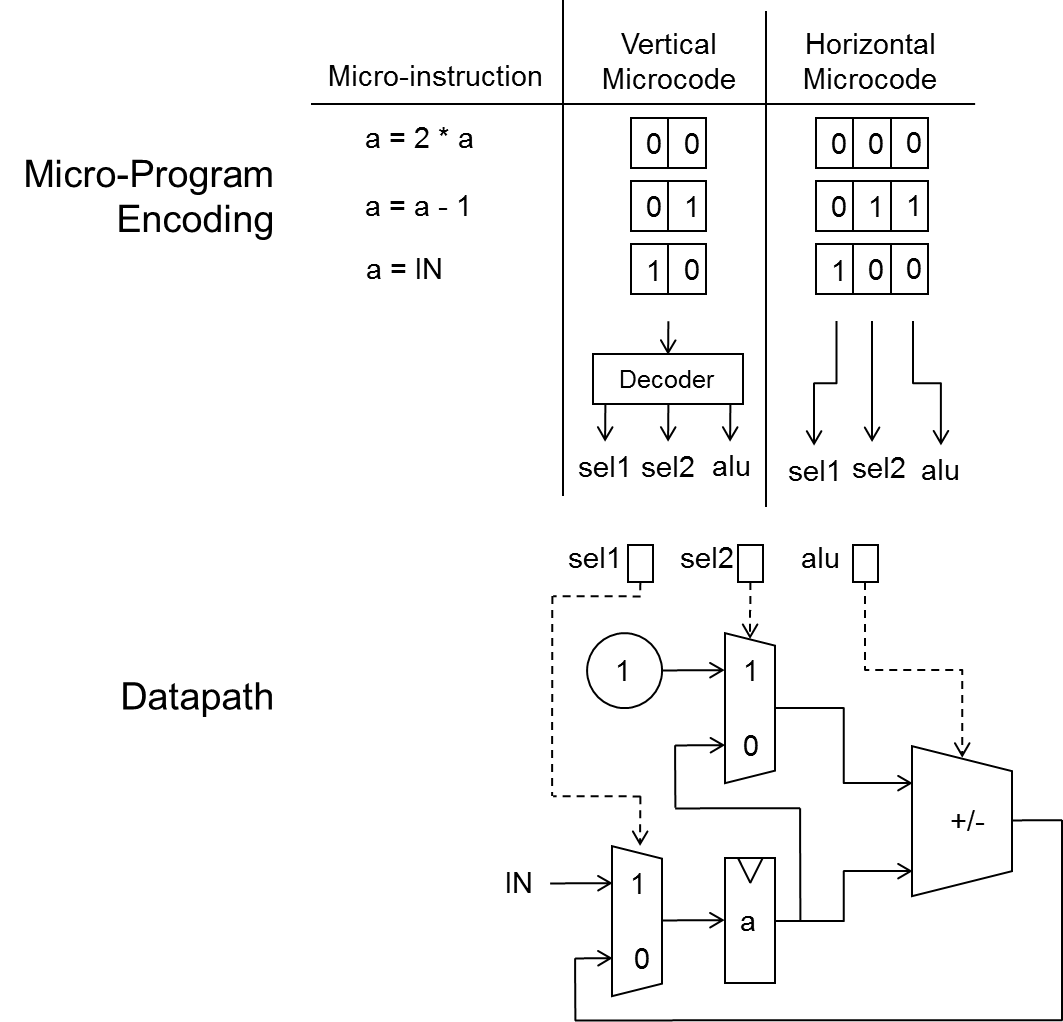
- There are two approaches at micro- instruction encoding
- Horizontal microcode, where no or minimal decoding is required is done
- Vertical microcode, where the maximal amount of instruction encoding is done requiring more decoding
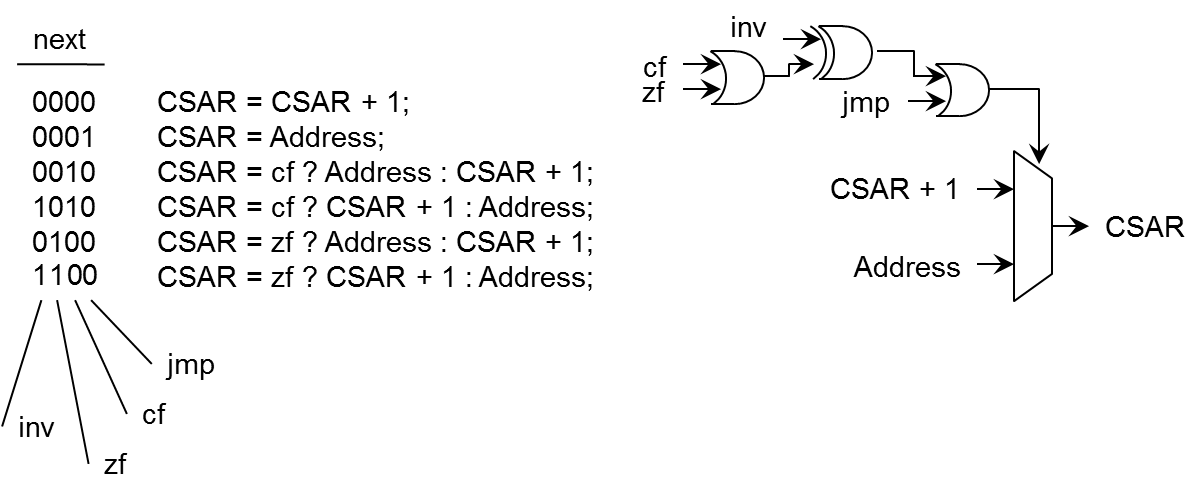
- Yet, four bits have been used, indicating that there is some redundancy
- The encoding was chosen to simplify the design of the next-address logic
- Another reason to leave ’room’ in the encoding is to allow future upgrades
- For example, easy to add an additional conditional jump that uses an arbitrary combination of cf and zf
Example Datapath Controller
- Consider the micro-programmed controller with a datapath attached
- The datapath includes an ALU with shifter unit, a register file
with 8 entries, an accumulator register, and an input port

Writing Microprograms
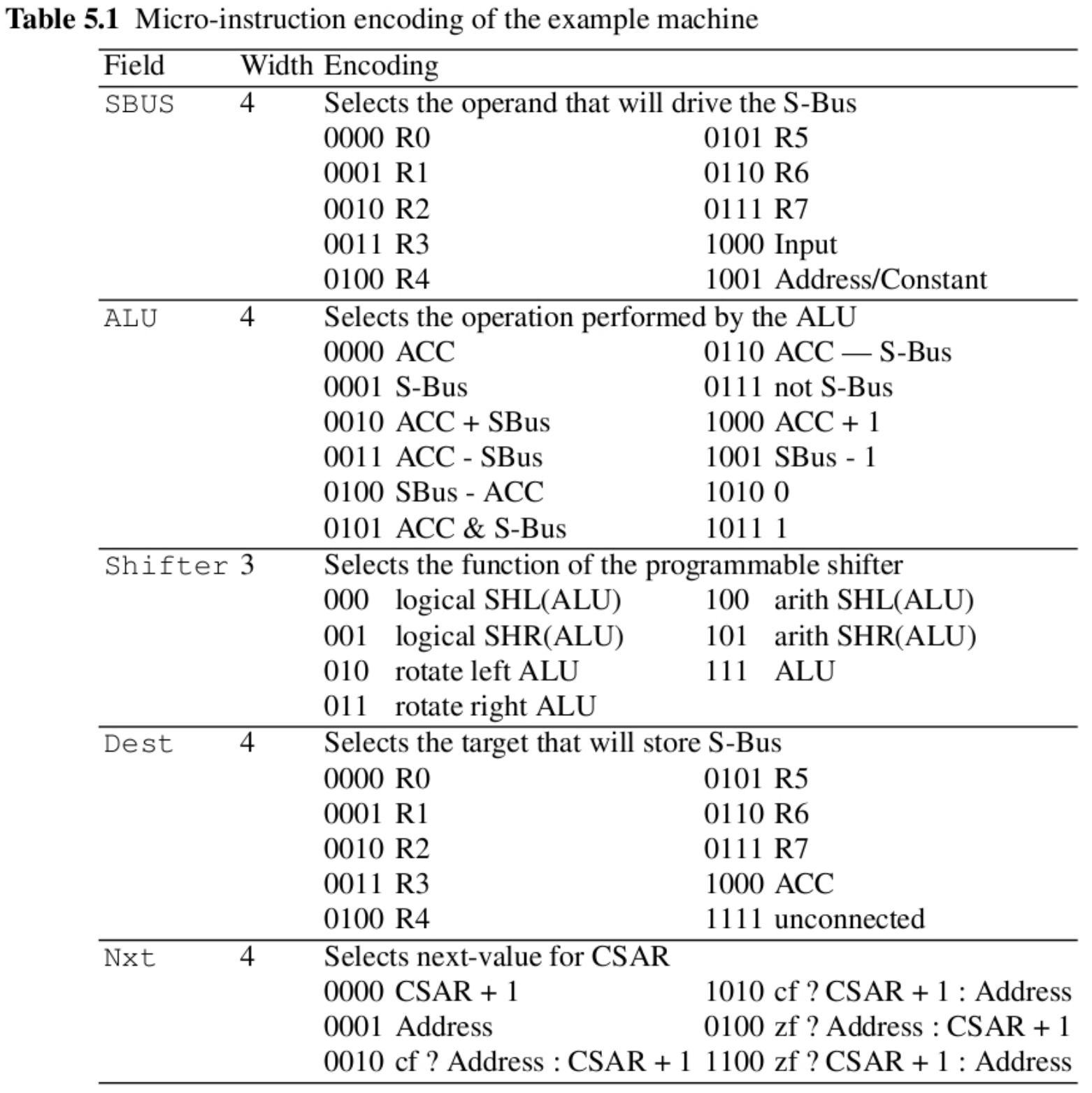
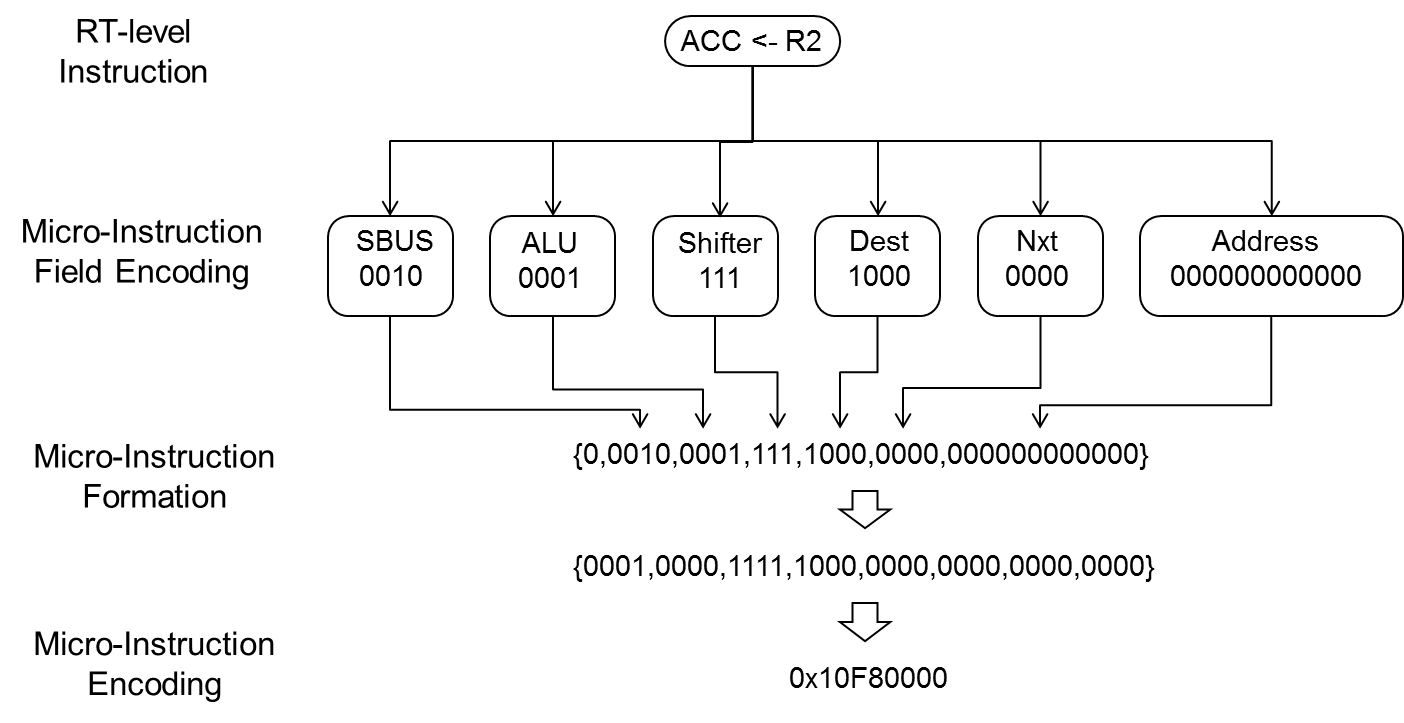
- table illustrates the encoding used by each module of the design
- A micro-instruction defines the module function for each module of the micro-programmed machine, including a next-address for the Address field
- When a field remains unused during a particular instruction, a don’t care value can be specified
- The don’t care values are designed to prevent unwanted state changes in the datapath
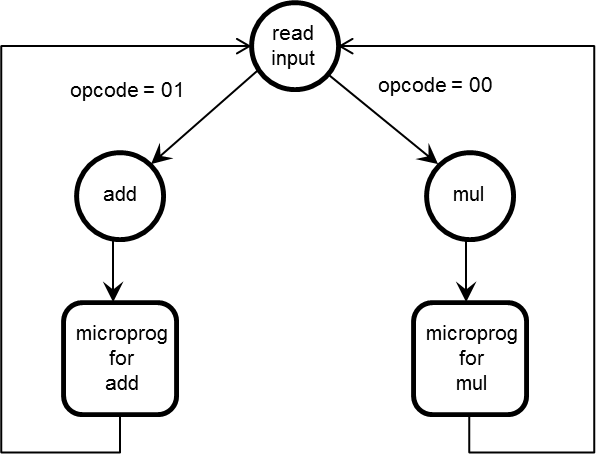
A microprogram Interpreter
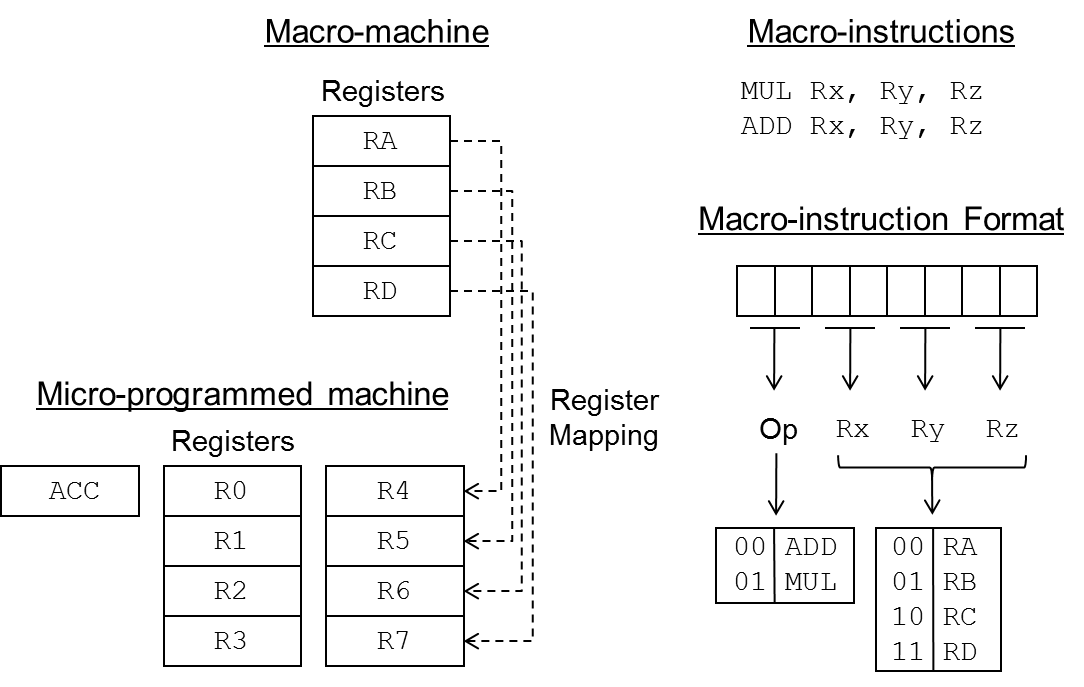
- Consider the following simple machine as a programmers’ model of a macromachine
- It has four registers RA through RD, and two instructions for adding and multiplying those registers
- The macro-machine has the same wordlength as the micro-programmed machine but has fewer registers than the micro-programmed machine
- To implement the macro-machine, we map the macro-register set directly onto the micro-register set (as shown )
Microprogram Pipelineling
- Pipeline registers can be used to break up the micro-program controller logic
- However, adding pipeline registers has a large impact on the design of micro-programs
- Each choice cutes through a different update-loop of the CSAR register
- through the next-address logic,
- through the control store and the next-address logic
- through the control store, the data path, and the next-address logic
- These combinational paths may limit the maximum clock frequency of the microprogrammed machine
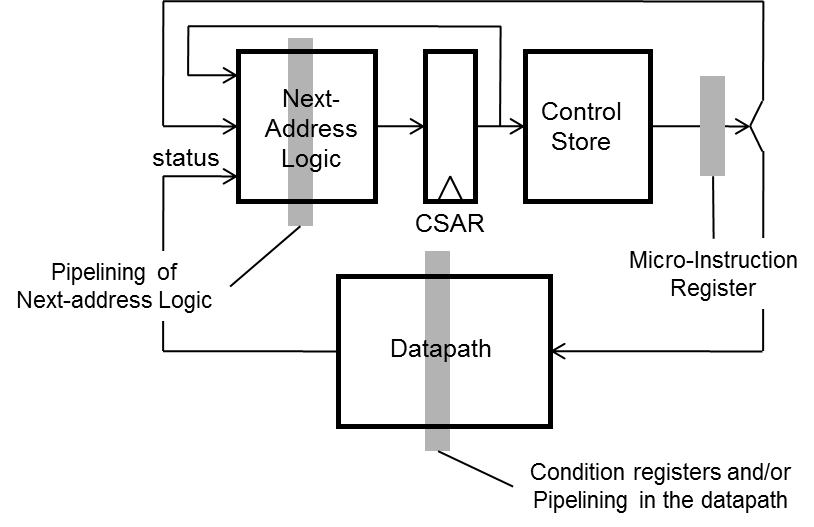
- There are three common places where pipeline registers may be inserted, as shown above with shaded boxes
- (i) At the output of the control store as a micro-instruction register: Inserting a register there allows temporal overlap of the datapath evaluation, the next address evaluation, and the micro-instruction fetch
- (ii) In the datapath to create a datapath pipeline
- Common to have condition-code registers can be inserted on datapath outputs (status registers)
- (iii) In the next-address logic: in case high-speed operation is required and the target CSAR address cannot be evaluated within a single clock cycle
(i) Micro-instruction Register

- Consider the effect of including a micro-instruction register
- With this register in place, micro-instruction fetch is offset by one cycle from evaluation micro-instruction
- For example, when the CSAR is fetching instruction i, datapath and nextaddress logic executing instruction
- Consider this offset under the condition that the instruction stream contains a jump instruction
- The micro-programmer entered a JUMP 10 instruction in CSTORE location 4, and which is fetched in clock cycle N
- In clock cycle N+1, the micro-instruction will appear at the output of the microinstruction register and its execution will complete in cycle N+2
- For a JUMP, this means that the CSAR should NOT point to the next instruction in cycle N+2, but the instruction at N+2 has already been fetched
- To avoid a wasted execution cycle (e.g. no-op after branch) the platform should support
- delayed execution slot (delayed branch concept) is an instruction that may be executed independent of the branch instruction
- A compiler may handle this by choosing an appropriate instruction to reorder otherwise the programmer would need to handle this
- ability to cancel execution of instruction (dependent on branch decision)
- delayed execution slot (delayed branch concept) is an instruction that may be executed independent of the branch instruction
(ii) Datapath Condition-Code Register

- Assume that we have a condition-code register in the datapath, in addition to a microinstruction register
- The fact that it is a register means that the actual condition code will not be available in the current clock cycle (when the expression is evaluated
- Therefore, conditional-jump instructions can only operate on datapath conditions from the previous clock cycle
- Here, the branch instruction in CSTORE(4) is a conditional jump
- When the condition is true, the jump will be executed with one clock cycle delay
- The JZ instruction implements the jump in cycle N+2, which tests the condition code generated in cycle N+1 and which becomes available in N+2
- Here, the micro-programmer just needs to be aware that condition flag must be generated one clock cycle before they are used in conditional jumps
- Note instruction at N+3 needs to be canceled if jump is taken
(iii) Pipelined Next-Address Logic

- Assume that there is a third level of pipelining available inside of the next-address update loop
- For simplicity, we will assume there are two CSAR registers back-to-back in the next-address loop
- The output of the next-address-logic is fed into the CSAR pipeline register and the output of CSAR pipeline register is connected to CSAR
- Assuming all registers are initially zero, the two CSAR registers in the next-address loop result in two (independent) address sequences
- Each instruction of the micro-program is executed twice!
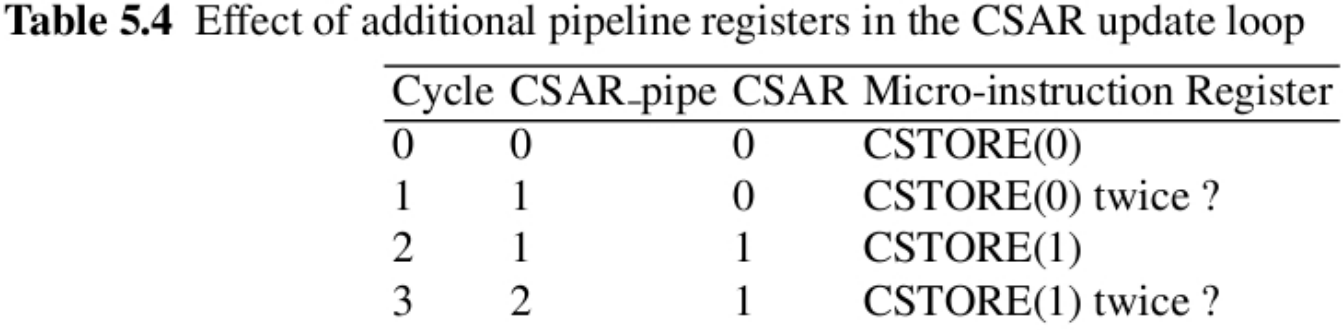
- careful initialization of CSAR pipe and CSAR needed such that they start out at different values (e.g. 1 and 0)
- Unfortunately, special load needs to be done for each jump instruction too
- This complicates the design and the programming of pipelined next-address logic