Ch 7 General Purpose Embedded Cores
Ryan Robucci

• Spacebar to advance through slides in order
• Shift-Spacebar to go back
• Arrow keys for navigation
• ESC/O-Key to see slide overview • ? to see help
• ESC/O-Key to see slide overview • ? to see help
 Printable Version
Printable Version
Typical Microprocessor Toolchain

Cross Compiler
- C program with function calls, arrays, and global variables:

- A cross-compiler is required to create an executable for a processor different from the processor used to the compiler.
Elements of Assembly

Object Code Dump

- micro-processor works with object code, binary opcodes generated out of assembly programs.
RISC Pipeline

Control Hazard

Delayed Branch Instruction
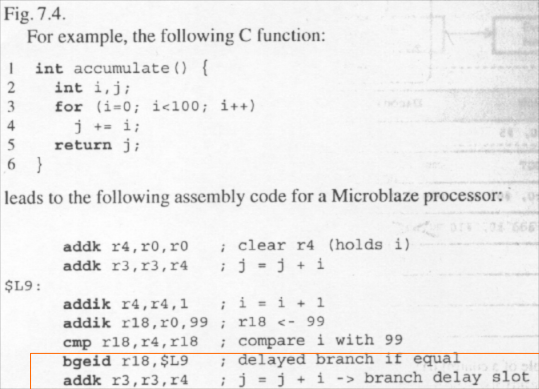
- The delayed-branch instruction for Microblaze (Xilinx Soft Processor) is
bgeidBranch Immediate if Greater or Equal with Delay,bgeiis Branch Immediate if Greater or Equal

Structural Hazard



Examining Data Storage
- Checking Endianess

- A little endian processor will print 78563412 while a big-endian processor will print 12345678.
Variables in the Memory Hierarchy

/usr/local/arm/bin/arm-linux-gcc -02 -c -S accumulate.c




- Arguments and return value of the accumulate function are passed through register r0 rather than main memory.


Program Layout
- Mentally distinguish program storage in a file or ROM vs how it is stored when loaded. The latter includes dynamic memory structures that change at runtime, like the stack (such as used for local variables and stack frames) and the heap (used for dynamic memory allocation e.g. malloc and free).
- In example:
- .text segment maps into fast static RAM
- .data, stack and heap segments map into DDR RAM
- dynamic data (heap), local data (stack) and global data (bss) are example sections of run-time memory segments that do not correspond to a single section in the elf files


- Later we will discuss examining code section size.
Examining Size
- toolchains include a size utility (e.g. arm-linux-size) to show the static size of a program – the amount of memory required to store instructions, constants, and global variables

- Shows 300 bytes in text, 16 bytes in initialized data, 0 bytes in the uninitialized data sections
- The total is given in dec and hex
- The size utility can analyze the executable as well, which includes the linked libraries.

- Libraries have a large impact on code size (and execution time) and should be selected with care in resource-constrained environments.
- Often there are alternative low-foot print/lightweight alternatives provided for standard functions (: printf)
- Note, the size utility does not show dynamic memory usage, and cannot predict the amount of stack or heap required since they are not determined by code compilation
Examining Sections
- Reports on the text, data, bss sections along with additional sections like debugging info can be listed using the -h flag of objdump to get section header listing from the elf file
- VMA (virtual memory address) represents the location within the elf file
- LMA (load memory address) represents the location in memory at runtime

Examining Symbols
- Symbols may be viewed using the -t flag with the objdump utility

- Note num and res in the .rwdata and .bss sections respectively
- Can also examine symbols using -Wl , -Map=.. option with linker to see the linker map file. This includes a listing of the object files used to create the executable.

Examining assembly code
- Provided by -S with compiler (gcc)

- Creates modulo.s:

- Also provided from disassembly of object or executable using objdump utility with the -D flag

- Being able to investigate assembly code (even for processors foreign to you) enables you to
- understand what a compiler can and will do, and the effect of compiler optimizations.
- make more accurate decisions on potential software performance (ex: Use of stack frames vs registers)
- understand timing of code, which can be very important for hardware interfacing.

- From assembly, we can identify a similar optimization that would otherwise be directly done in C using pointer arithmetic


- Book provides a discussion on gplatform.

/usr/local/arm/bin/arm-linux-gcc -static -S gcd.c -o gcd.S

Example Reporting Information from Simulator

- Example listing using SimIt-ARM
- Cycle: cycle count at the fetch
- Addr: location in program memory
- Opcode: the instruction opcode
- P: Pipeline miss-speculation. 1 indicates removal from pipeline
- I: Instruction-cache miss.
- D: Data-cache miss
- Time: total time instruction is in the pipeline
- Mnemonic: Assembly code
- Can understand significance and causes cache misses, stalls (type of hazard), canceled instructions, etc..
- Can redesign code, compilation options, processor, caches sizes, etc..
 Fig 7.12 Mapping of address 0x8524 in a 32-set, 16-line, 32-bytes-per-line set-associative cache
Fig 7.12 Mapping of address 0x8524 in a 32-set, 16-line, 32-bytes-per-line set-associative cache
Use of HDL for processor simulation

- HDL simulation can replace a instruction-set simulator and provide more detail but there are caveats