Managing Metastabilty in Systems
Ryan Robucci

• Spacebar to advance through slides in order
• Shift-Spacebar to go back
• Arrow keys for navigation
• ESC/O-Key to see slide overview • ? to see help
• ESC/O-Key to see slide overview • ? to see help
 Printable Version
Printable Version
Metastability is Unsolvable
- Synchronization and Arbitration (overview and motivate metastability with arbitration problem) “Synchronization, Metastability and Arbitration”
- Understand Folk lure slides Page 16

- We can apply this general “two async” signals scenario to the specific situation where C is the clock and we want B to be data.
- Metastability is fundamentally not solvable (except for in special cases)
Synchronizers in Digital Input Circuitry (microcontroller):
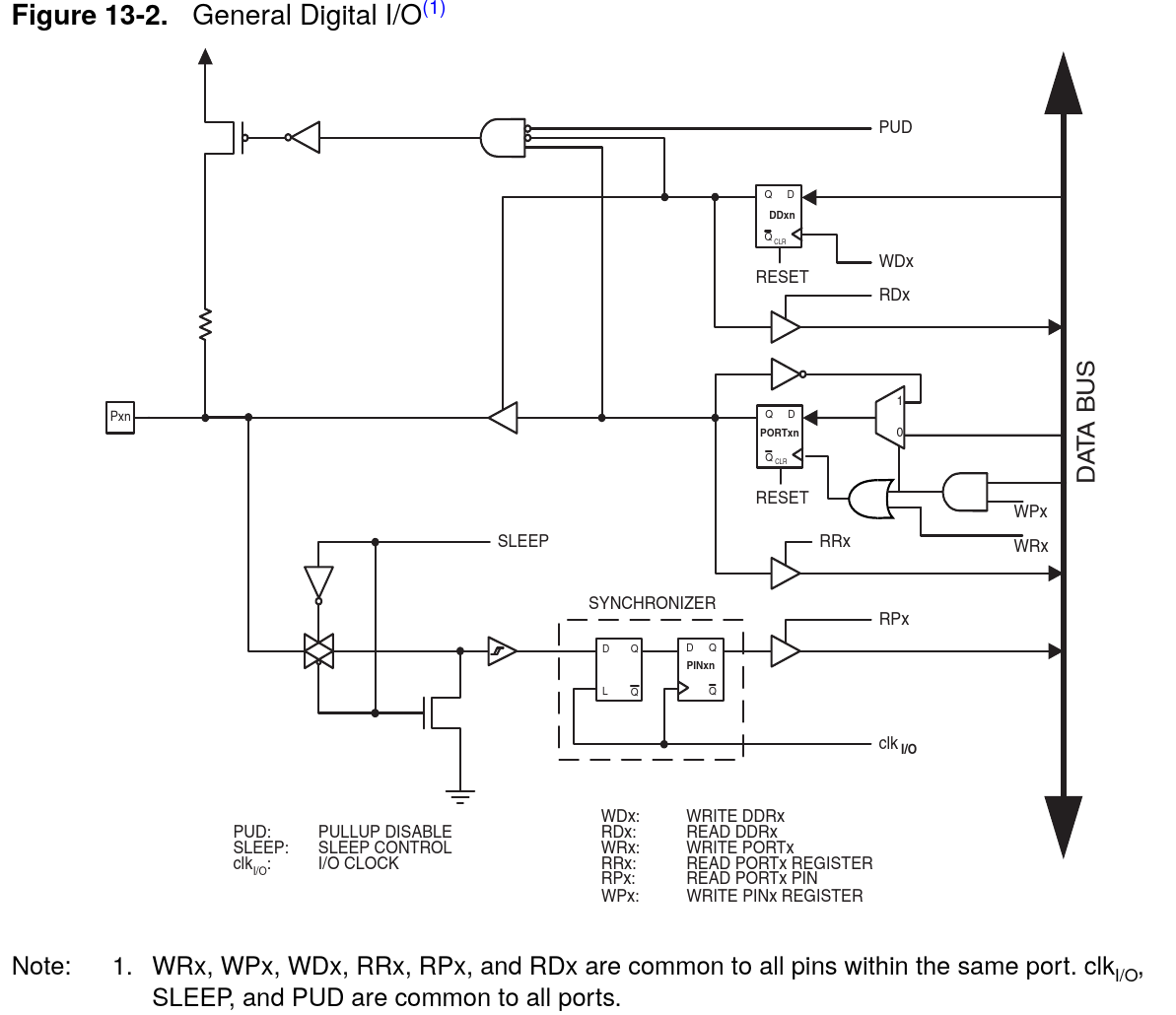
Note the use of a synchronizer in the following datasheet:
ww1.microchip.com/downloads/en/DeviceDoc/doc8018.pdf#page=66
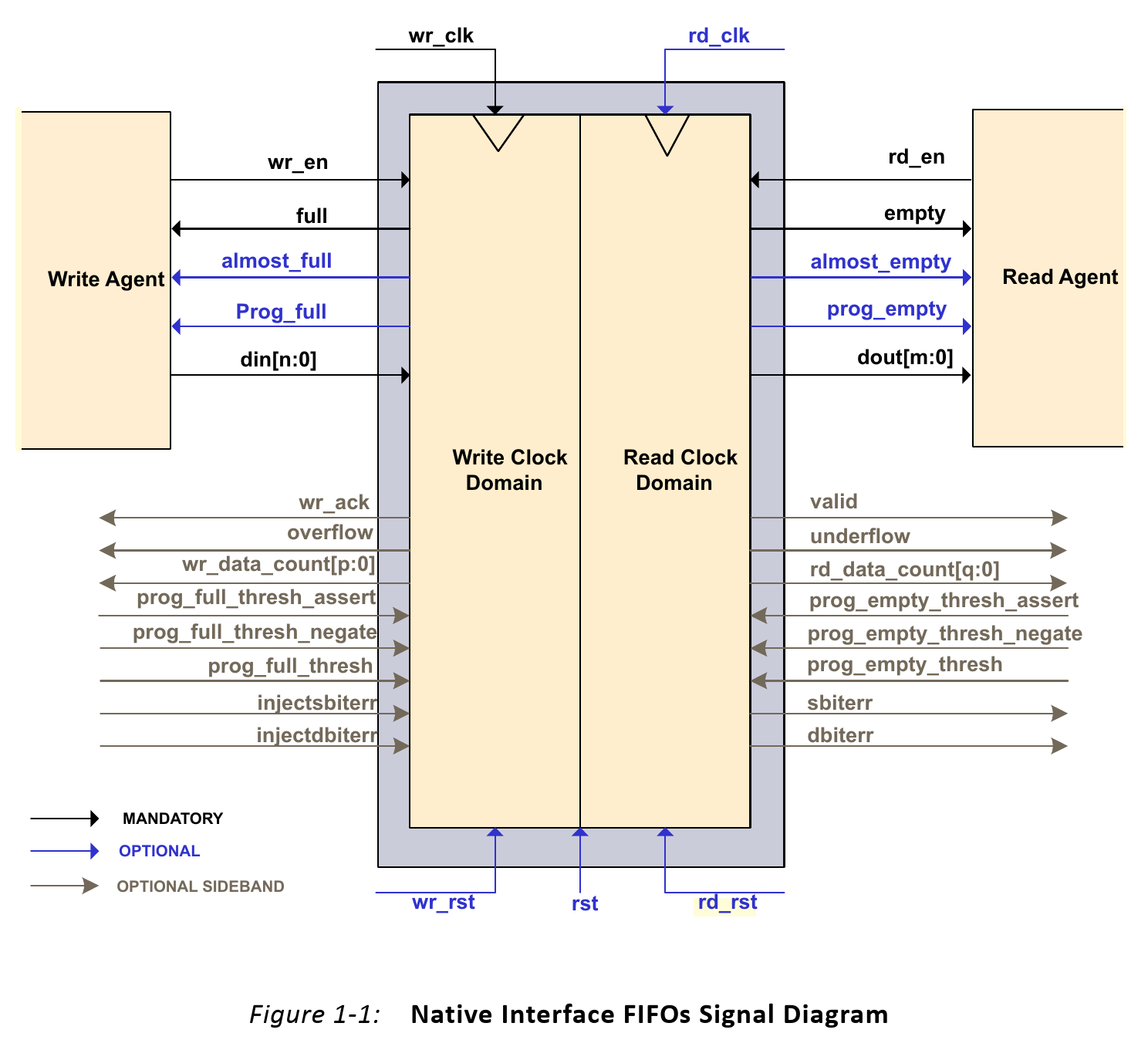
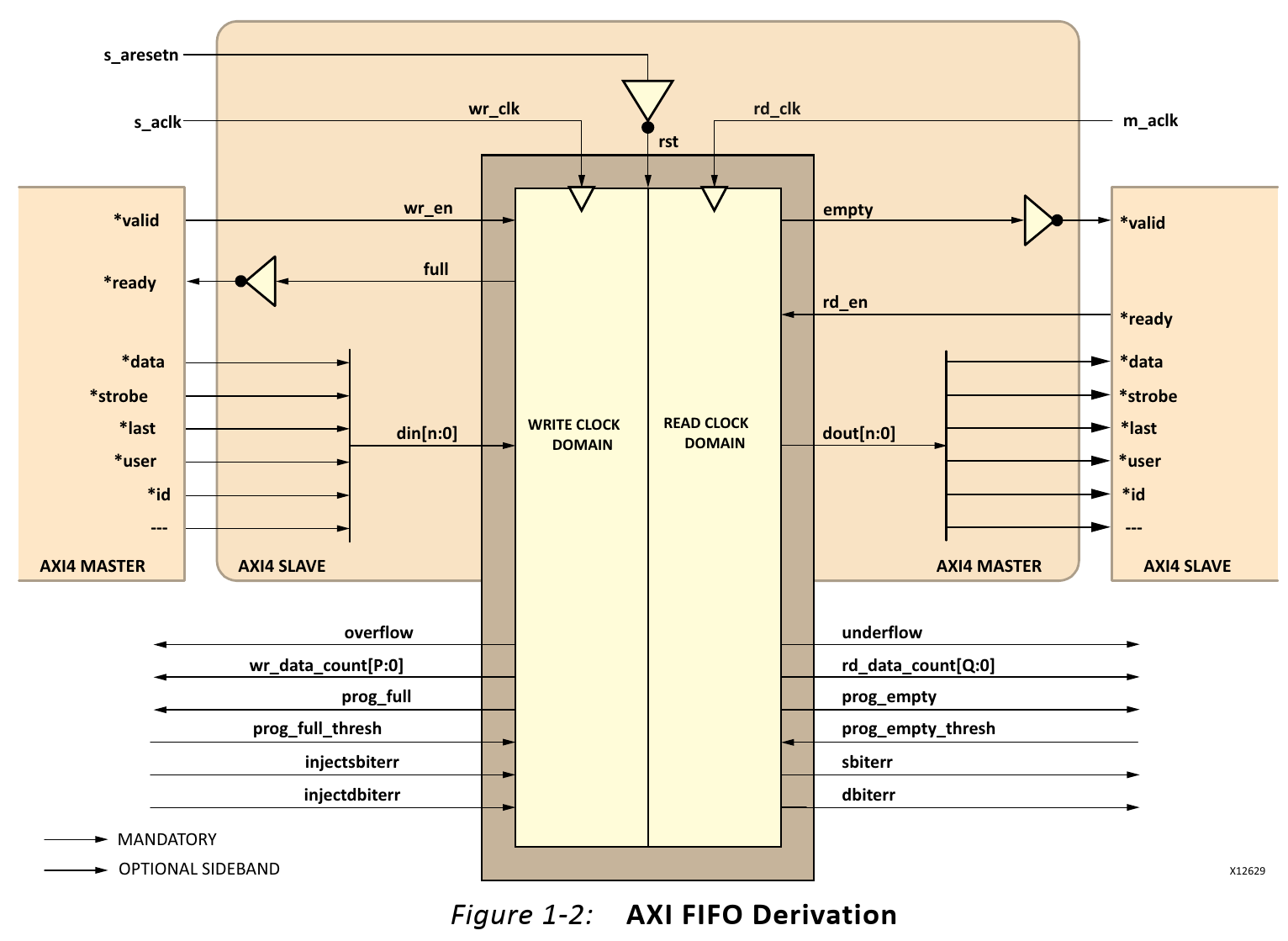
FIFO as Synchronizers
- It is commont to use FIFOs to transfer data between clock domains (or to/from an asynchronous domain and a synchronous domain)
- IP Blocks and Generators are typically provided for this and are designed for metastability mitigation: